




歩行分析において、「なぜ歩けるのか?」という根本的な問いを説明する際に、倒立振子モデル(Inverted Pendulum Model)は非常に有用な理論モデルです。
歩行中のエネルギー効率・姿勢制御・筋活動を読み解くための鍵として倒立振子モデルがよく紹介されます。
倒立振子モデルとは?
通常の振子との違い
通常の振子:重りが下にぶら下がっており、重力に引かれて揺れる。
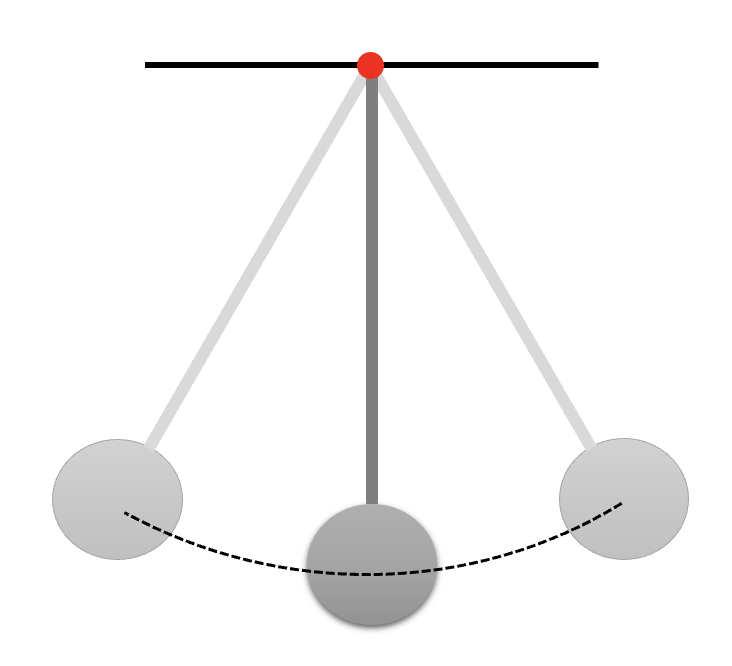
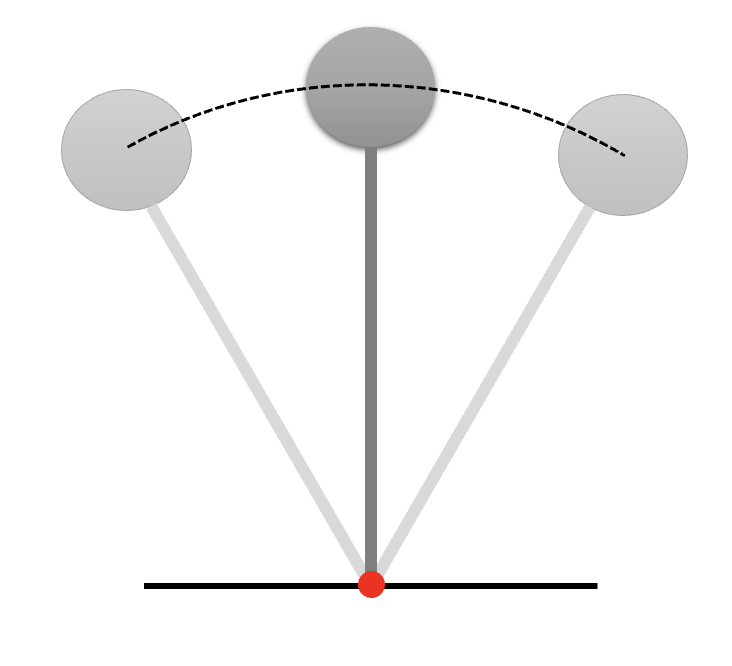
倒立振子:重心が支持点よりも上にある状態。立つ・歩く・バランスを取る動作に対応。
歩行との関連
- 単脚支持期(single support phase)において、支持脚が固定点となり、体幹(重心)がその上を回転することで、倒立振子のような挙動を見せる。
倒立振子モデルによる位置エネルギーと運動エネルギーの相互変換
「エネルギー保存」と「エネルギー変換」の観点が強調されています。
- 支持脚の上を通過する際(立脚中期〜終期)、
重心は上昇し速度が減少(位置エネルギー↑・運動エネルギー↓)。 - 逆に、重心が下降するときは
速度が増加し運動エネルギー↑・位置エネルギー↓。
このエネルギーの交換運動によって、筋活動によるエネルギー消費を最小限に抑えた効率的歩行が可能になる。
運動学的特徴:重心の軌道と関節モーメント
重心の運動
- 歩行中の重心軌道は「円弧状」に近い。
- 倒立振子のように膝関節をほとんど屈伸せずに上下動を伴いながら前方へ移動する。
股・膝・足関節の役割
| 関節 | 倒立振子モデルにおける役割 | 解説 |
|---|---|---|
| 股関節 | 重心の前方移動を制御 | 屈曲/伸展トルクの調整により前方回転の速度調整 |
| 膝関節 | 安定性の確保 | 中間位でロックされることで倒立棒としての安定性を担保 |
| 足関節 | ピボット機能 | ロッカー機構として、回転中心を担う(ヒールロッカー、アンクルロッカーなど) |
臨床応用:倒立振子モデルから読み解く異常歩行
| 歩行異常 | 倒立振子との乖離 | 臨床的意義 |
|---|---|---|
| 歩幅の狭小化 | 重心の上下動が減少し、エネルギー交換効率が低下 | 筋力・可動域の低下を疑う |
| 膝屈曲保持歩行 | 振子運動が破綻し、筋活動の増大 | 膝関節伸展トルクや股関節戦略の確認が必要 |
| 体幹の前傾保持 | 支持脚上のバランスが崩れ、振子としての安定性が失われる | 体幹・殿筋群の筋力低下を示唆 |
まとめ:理学療法士が歩行を見るときの視点
- 倒立振子モデルは、“力を使わずに移動する”ヒトの運動戦略の象徴。
- 歩行中の重心移動・エネルギー効率・関節協調性を読み解く際に非常に有効な視点。
- 歩行異常をみる際も、「どの要素が倒立振子モデルから逸脱しているか?」という視点を持つと、臨床推論の質が向上します。
おわりに:歩行を物理学的にとらえる第一歩として
倒立振子モデルは単なる理論にとどまらず、臨床での観察・治療戦略に直結する力学的フレームワークです。
参考文献
- 石井慎一郎 編著『動作分析 臨床活用講座 バイオメカニクスに基づく臨床推論の実践』メジカルビュー社
https://www.otoreha.com/motion-analysis-clinical-application-course-practicing-clinical-reasoning-based-on-biomechanics/ - Inman VT, Ralston HJ, Todd F. Human walking.


コメント